Таблица 1- Предаточные функции звеньев исходной системы


Таблица 2 – Показатели качества проектируемой САУ



-
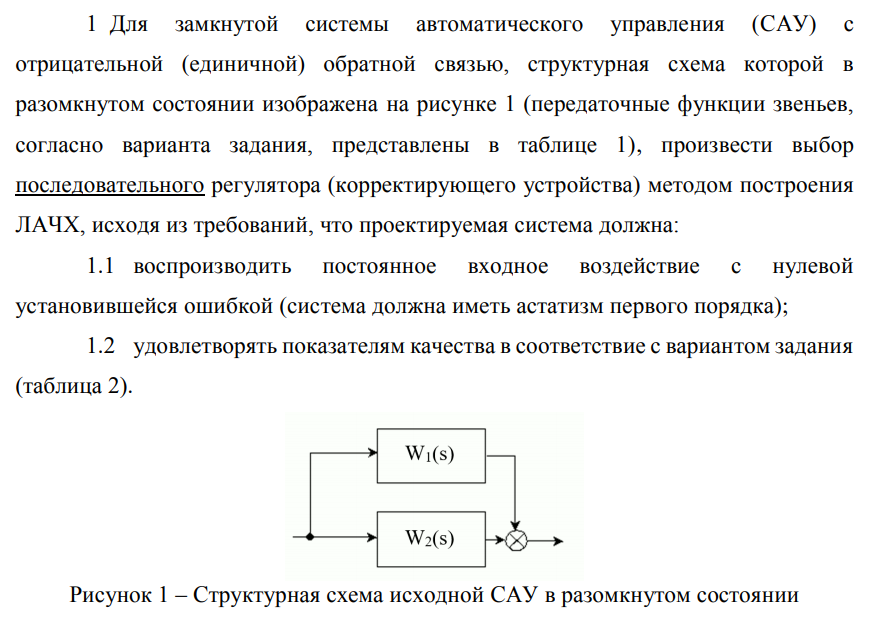
Структурная схема САУ
Передаточная функция параллельного соединения звеньев с рисунка 1:

Рис. 1 – Параллельное соединение исходных звеньев
Будет иметь вид:
или


Очевидно. что корни знаменателя этой дроби комплексно сопряжённые.
Среди корней знаменателя два комплексно сопряжённых и один действительный отрицательный:

Значит, в числителе присутствует форсирующее звено:
Разделим числитель на

и остаток деления представим, сокращая на коэффициент свободного члена, в виде:
Таким образом, числитель можно представить в виде произведения двух передаточных функций:
и коэффициента усиления составного звена
Передаточная функция всего объекта:

-
Синтез последовательного корректирующего устройства
на основании метода желаемой ЛАЧХ-
Асимптотическая частотная характеристика исходной САУ
-
Построим асимптотическую ЛАЧХ объекта управления L().
Для построения передаточную функцию САУ в разомкнутом состоянии представим в виде последовательно соединённых типовых звеньев.
Звено 1: колебательное, I I-го порядка, наклон -40дБ/дек после частоты среза
W1s=11s2+0.5s+1
Коэффициент передачи данного звена K1=1.0:
20lg 1.0 =0.0
T1=1 с (коэффициент при квадрате s)
3=1T1=11=1.0 радс
Асимптотическая ЛАЧХ звена 1 в общем виде:
L1={20lg 1 , <1 20lg 1 -40lg -40lg 1/T1 , 1
С учетом численных значений:
L1={20lg 1 =0, <1 -40lg T1 , 1
Звено 2: форсирующее II-го порядка, наклон +40дБ/дек
Wn2s=1.046684s2+0.9s+1
Коэффициент передачи данного звена =1.0:
20lg 1 =0
T2=1.046684=1.0230761 с (коэффициент при квадрате s)
2=1T2=11.023076=0.97744451 радс
lg 0.9774445=-0.0099080 дек
Асимптотическая ЛАЧХ звена 2 в общем виде:
Ln2={20lg 1 , ω≤2 20lg 1 +40lg -40lg 1/T2 , >2
С учётом численных значений:
Ln2={20lg 1 , ω≤0.9774445 20lg 1 +40lg 1.023076 , >0.9774445
Звено 3: форсирующее I порядка, наклон +20дБ/дек
Wn1s=2.60563s+1
Коэффициент передачи данного звена равен составному коэффициенту передачи всего объекта: K12=11.0:
20lg K12 =20lg 11.0 =20.827854
3=1T1=12.60563=0.3837840.384 радс
Асимптотическая ЛАЧХ звена 3 в общем виде:
Ln1={20lg K12 , ω≤3 20lg K12 +20lg -20lg 1/T1 , >3
С учётом численных значений:
Ln1={20lg 11.0=20.827854 , ω≤0.9774445 20lg 11.0 +20lg 2.60563 , >0.9774445
Т.е., асимптотическая ЛАЧХ форсирующего звена имеет наклон +20 дБ/дек, начиная с частоты ω=0.9774445, и проходит на уровне 20lgK12=20lg(11) до этой частоты.
При суммировании асимптотических ЛАЧХ представленных звеньев, получим характеристику всей системы Lнс() (см. рисунок 2).
Построение асимптотической ЛАЧХ начинаем с низкочастотного участка: т.к. в системе присутствует форсирующее звено, наклон этого участка составляет 0 дБ/дек. Низкочастотная зона имеет протяжённость (-∞, ω1], т.е. до первой частоты среза ω1=0.384 рад/сек.
Начиная с первой частоты среза ω1 = 0.384 рад/сек в среднечастотной зоне ЛАЧХ получает наклон +20 дБ/дек от форсирующего звена. Эта зона продолжается до второй частоты среза ω2 = 0.9774445 рад/сек.
Начиная со второй частоты среза ω2 = 0.9774445 рад/сек в высокочастотной зоне ЛАЧХ наклон увеличивается до +60 дБ/дек из-за влияния второго форсирующего звена 2-го порядка. Однако, при третьей частоте среза ω3 = 1.0 рад/сек, находящейся в непосредственной близости от ω2, колебательное звено компенсирует этот прирост наклона и он возвращается к значению +20 дБ/дек.
Эта зона продолжается до в плюс-бесконечность [ω3, +∞).
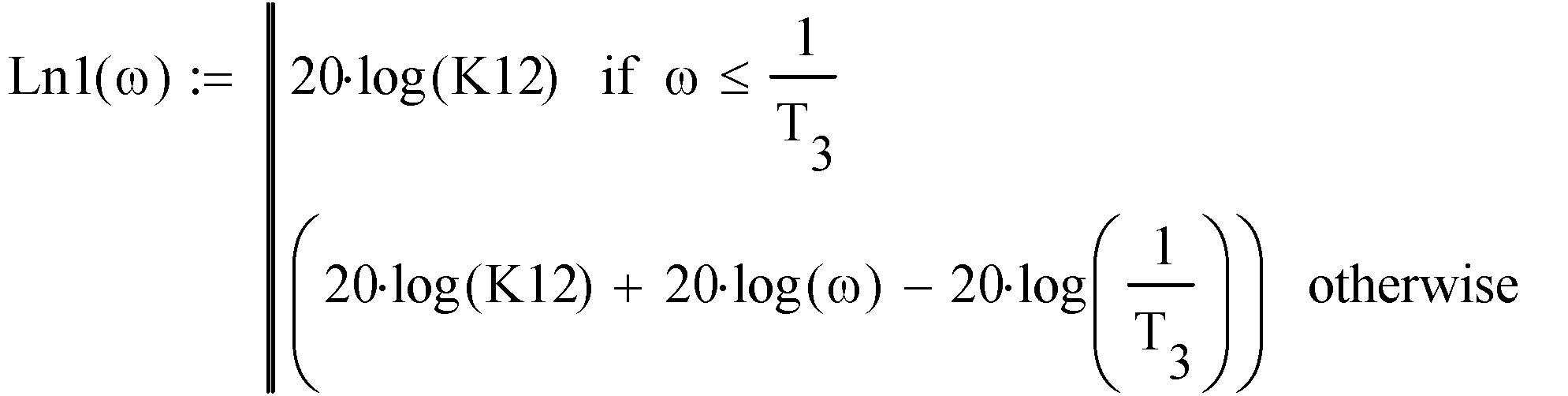



Рис. 2 – Асимптотические ЛАЧХ исходных звеньев и всего объекта
-
Построение желаемой ЛАЧХ и ЛАЧХ КУ
Построим желаемую АЛАЧХ скорректированной САР Lж(ω), состоящую из низкочастотной (НЧ), среднечастотной (СЧ) и высокочастотной (ВЧ) областей, которая обеспечивает заданные показатели качества переходных процессов и требуемую скоростную ошибку.
- допустимая статическая ошибка регулирования
ε = 0
- допустимая скоростная ошибка регулирования
ε = 0.002 с
- максимально допустимое время регулирования
tp = 2.0 с;
- максимально допустимое перерегулирование
σmax = 25%.
Наклон НЧ области желаемой ЛАЧХ принимаем равным -20дБ/дек (система астатическая, с 1-м порядком астатизма).
Из номограмме (рис.3) для выбранного значения перерегулирования σ = 25% находим:

Рис.3. Номограммы
что максимальное значение вещественной частотной характеристики Pmax=1.17.
При Pmax=1.17 время регулирования (Рис. 3) Tрег=4,0πс=2.0=tр
Определим желаемую частоту среза СЧ области:
с=4.0Tрег=4.0π2.0=6.28 радс
lg 6.28 =0.80 дек
Построение начинаем со среднечастотной (СЧ) области.
Наклон СЧ области -20 дБ/дек.
Ординаты начала и конца СЧ зоны принимаем ΔL =+21 и ΔL =-21 дБ/дек.
Отсюда, находим частоты начала и конца СЧЗ:
[lg(ωс) - lg(ωс1)]x20= ΔL => lg(ωс1)= lg(ωс) - ΔL/20=0.80–1.05 = -0.25
[lg(ωс2) - lg(ωс)]x20= ΔL => lg(ωс2)= ΔL/20+ lg(ωс)=1.05+0.80 = 1.85
ωс1 = 10-0.25= 0.562 рад/сек;
ωс2 = 101.85= 70.8 рад/сек.
Наклон низкочастотного участка желаемой ЛАЧХ задаём с -20 дБ/дек, что бы обеспечить требуемый астатизм системы (1-го порядка). Так, что он автоматически сопрягается (см. рисунок 4) в точке ωс1=0.562 рад/сек, со среднечастотным участком при амплитуде LЖ(ωс1)=21, дБ.
Сам начальный (НЧ) участок рисуем до точки с минимальной отображаемой частотой ωmin = 0.1 рад/сек и ординатой LЖ(ωmin)= 37 дБ.
Высокочастотная область (не отображена на рисунке 4) имеет наклон –20 дБ/дек в целях простоты реализации последовательного корректирующего устройства (КУ). Она начинается от частоты ωс2 = 70.5 рад/сек до максимальной частоты графика ωmax = 100 рад/сек.
Уравнения, описывающие желаемую ЛАЧХ имеют вид:
Для расчёта в MathCAD использованы следующие обозначения:
Ll – ЛАЧХ области низких частот (Low frequencies);
Lm – ЛАЧХ области средних частот (medium frequencies);
Lh – ЛАЧХ области высоких частот (high frequencies);
Lz – желаемая ЛАЧХ, полученная сложением всех участков по всем частотам;
Lr – ЛАЧХ корректирующего устройства (регулятора).
ЛАЧХ корректирующего устройства (регулятора) определяем путём графического вычитания ординат ЛАЧХ объекта управления из ординат желаемой ЛАЧХ:
Lr=Lж-L
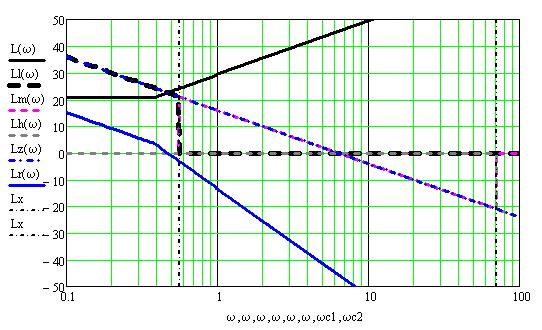
Рис.4. ЛАЧХ объекта, желаемая ЛАЧХ и ЛАЧХ регулятора
-
Передаточная функция КУ
По ЛАЧХ корректирующего устройства восстановим его передаточную функцию.
Она состоит из 2-х последовательно соединённых типовых звеньев, а именно:
Начальный наклон -20 дБ обеспечивает интегрирующее звено.
Wr,1(s)=Krs
Последующую компенсацию форсирующего звена 1-го порядка, создающего возрастание ЛАЧХ объекта с наклоном +20 дБ начиная с частоты ω1=0.384 рад/сек, обеспечивает апериодическое звено.
Таким образом, фактически осуществляется переход от наклона -20 дБ/дек к наклону -20 дБ/дек при 1-ой частоте сопряжения ω1=0.384 рад/сек. Откуда константа времени и передаточная функция апериодического звена в регуляторе:
Тr,1=11=10.384=2.6316 с=> Wr,1(s)=1Тr,1s+1=12.6316∙s+1
Исходя из построений, на 1-ой частоте сопряжения (НЧ с СЧ) желаемой ЛАЧХ ωс1=0.564 рад/сек, у ЛАЧХ регулятора должен появиться дополнительный наклон (до -40 дБ/дек), что может быть осуществлено апериодическим звеном:
Тr,2=1с1=10.564=1.787 с=> Wr,2(s)=1Тr,2s+1=11.787∙s+1
для обеспечения точного соответствия желаемой ЛАЧХ, это должно быть апериодическое звено 2-го порядка. Однако, на практике, оказывается достаточно звена 1-го порядка для компенсации форсирующего звена объекта и охвата САУ отрицательной обратной связью.
При частоте сопряжения ωс2 =70.5 рад/сек; для упрощения конструкции регулятора наклон ЛАЧХ не меняется и остаётся на уровне -20 дБ/дек.
В общем виде передаточная функция КУ:
Wrs=krs∙(Tr,1s+1)=11s∙(2.6316s+1)
где 20lgkr=Lж1-Lr1=20lg11.
Составим структурную схему синтезированной САР с учётом последовательного корректирующего устройства (КУ) (рис.5).

Рис.5. Структурная схема САУ с корректирующим устройством (КУ)
-
Передаточная функция скорректированной САР
Передаточная функция скорректированной разомкнутой САР:
Ws=WrsW12s=11s(2.6316∙s+1)112.6056s+11,0467s2+0.12164s+1s2+0.5s+1=
=1212.6056s+11,0467s2+0.12164s+1s(2.6316∙s+1)s2+0.5s+1=1130s3+15s2+30s+11s(2.6316∙s+1)s2+0.5s+1=
=1130s3+15s2+30s+112.6316s4+2.31586s3+3.1316s2+s=
Передаточная функция замкнутой САР:
Wzs=Ws1+Ws=1130s3+15s2+30s+112.6316s4+2.31586s3+3.1316s2+s1+1130s3+15s2+30s+112.6316s4+2.31586s3+3.1316s2+s=
=2.7273s3+1.3636s2+2.7273s+10.021749s4+2.7464s3+1.3895s2+2.7355s+1=
=1212.6056s+11,0467s2+0.12164s+148.980.0079504s+12.6055s+11.0499s2+0.1203s+1=>
Отсюда находим:
1) аналитическое выражение для реакции на единичное ступенчатое воздействие:
Lh(t)=Wzss=1s-0.99698s+125.78+0.0000493s+0.3838-0.0030624s+0.000393404s2+0.11623s+0.95248
где обратные преобразования Лапласа слагаемых:
L-11s=1
L-10.99698s+125.78=0.99698e-125.78t
L-10.0000493s+0.3838=0.0000493∙e-0.3838t
L-10.0030624s+0.000393404s2+0.11623s+0.95248=
=-0.00309cos 0.974t -0.000192sin(0.974t)e-0.0581t
Складывая полученные оригиналы дробей, получаем выражение для переходной характеристики:
ht=1-0.99698∙e-125.78t+0.0000493∙e-0.3838t-
-0.00309cos 0.974t +0.000192∙sin(0.974t)e-0.0581t
На рисунке 6 строим график переходной характеристики:

Рис.6. Переходная характеристика замкнутой скорректированной САУ
2) аналитическое выражение для реакции на непрерывно нарастающий сигнал x(t)=t, Лапрасово изображение которого:
Lx(t)=1s2
Ls(t)=Wzss2=1s2-0.00821s+0.0079264s+125.78-0.00012845s+0.3838+0.000413s-0.0030144s2+0.11623s+0.95248
где обратные преобразования Лапласа слагаемых:
L-11s2=t
L-10.00821s=0.00821
L-10.0079264s+125.78=0.0079264∙e-125.78t
L-10.00012845s+0.3838=0.00012845∙e-0.3838t
L-10.000413s-0.0030144s2+0.11623s+0.95248=
=-0.00309cos 0.974t -0.000192∙sin(0.974t)e-0.0581t
Складывая полученные оригиналы дробей, получаем выражение для реакции на нарастающий сигнал:
st=t-0.00821+0.0079264∙e-125.78t-0.00012845∙e-0.3838t+
+0.000385cos 0.974t -0.00315sin(0.974t)e-0.0581t
На рисунке 7 строим график этой реакции.
А на рисунке 8 - график ошибки: e(t)=x(t) – s(t)= t – s(t).
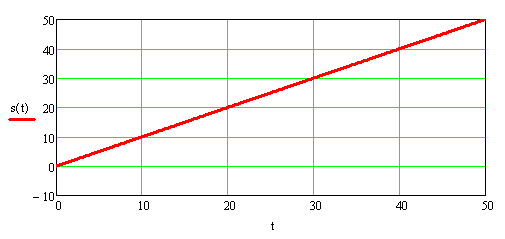
Рис.7. Реакция замкнутой скорректированной САУ x(t)=t

Рис.8. Ошибка замкнутой скорректированной САУ
при нарастающем входном воздействии
ВЫВОД:
В ходе настройки и подбора регулятора были получены фактические параметры регулирования, значительно лучше требуемых:
Таблица 1. Параметры регулирования САУ
-
Анализ устойчивости замкнутой скорректированной САУ
Найдём все полюса замкнутой скорректированной САР по характеристическому уравнению:
0.021749s4+2.7464s3+1.3895s2+2.7355s+1=0
или 48.980.0079504s+12.6055s+11.0499s2+0.1203s+1=0
или s+125.78s+0.3838s2+0.11623s+0.95248=0
Находим корни
B1 = -125.78;
B2 = -0.3838;
B3 = -0.58110+j∙0.97422;
B3 = -0.58110 - j∙0.97422;
Все корни характеристического уравнения «левые», т.е., их действительные части отрицательные и находятся слева от мнимой оси на комплексной плоскости. Достаточное условие устойчивости выполнено. При этом, необходимое условие (положительность коэффициентов характерис-тического полинома) так же выполняется.
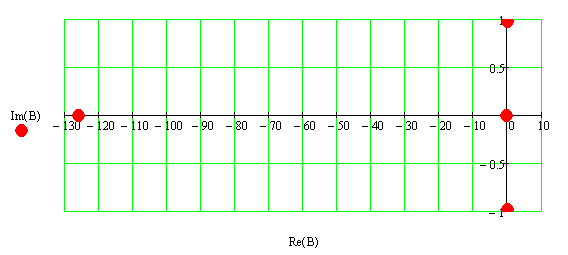
Рис. 9. Полюса передаточной функции замкнутой САУ